Delta机器人由三个平行的臂组成,每个臂都通过连杆与一个固定平台连接。它是一个并联机械臂,所有关节都在上方的一个平台内。这种设计使得Delta机器人能快速且精准地进行三维空间中的运动,特别适用于高速、高精度的工作。适合进行快速的拾取、放置和包装等任务。精度非常高,适合进行快速、高频次的操作。通常用于快速拾取、包装、分拣、贴标等任务,尤其适合需要高速和高精度操作的场景,如食品行业和电子产品的自动化生产线。其设计侧重于速度和精度,而非大负载。
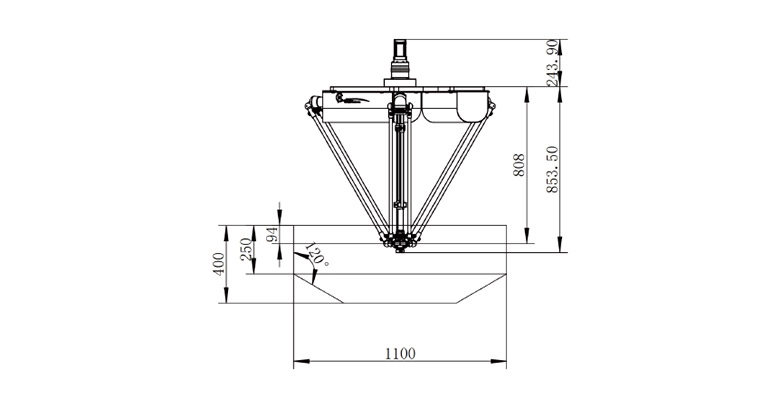
外形及工作空间图
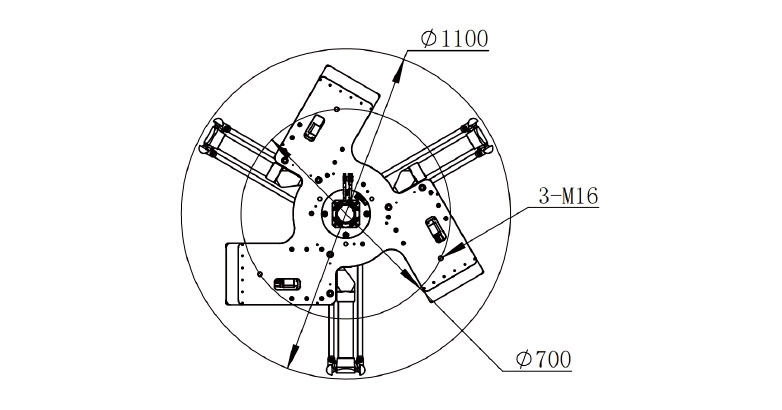
基座图
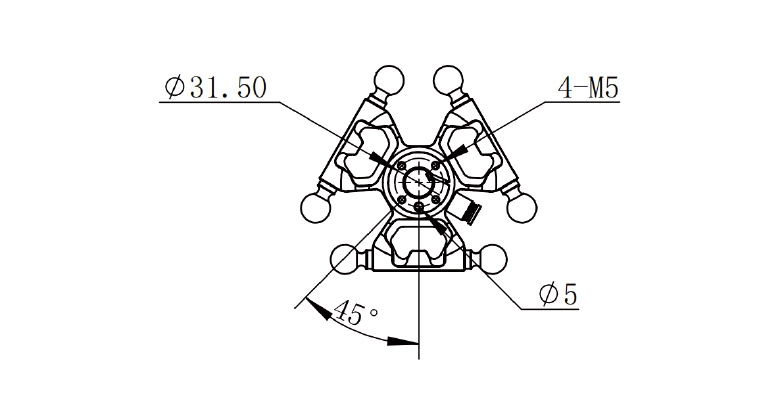
法兰末端图
任务的灵活配置

Delta机器人灵活抓取分拣

稳定的工作品质

接入恒匠自行研发的数字化操作系统

系统的解决方案

先进的传感控制

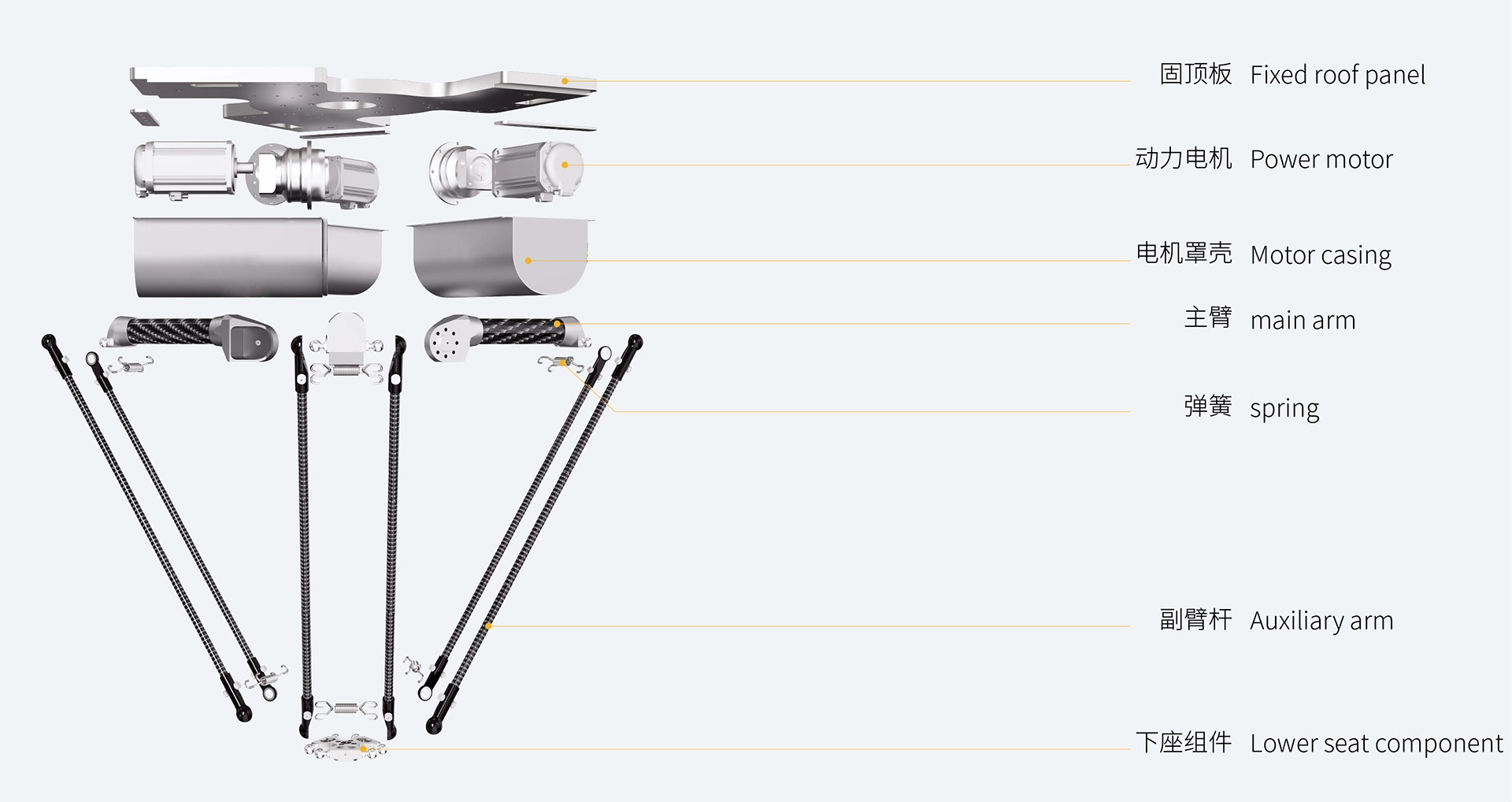
碳纤维布杆坚挺轻便
高精度、高频次

• 自研专利操作系统,高度匹配生产系统,以确保产能,手机、平板、电脑和自带触屏操作模式。

• 此工作站将杂乱的来料分拣至另一条输送带上整齐排放输送至包装区。
• ·精准控制:通过先进的控制系统,对面团成型系统的稳定性进行把控。

• Delta机器人以其独特的高速、高精度特性,在冷冻环境下依然能够稳定、高效地执行产品抓取、堆叠、输送等任务,极大地提升了生产线的自动化水平和生产效率。

• 可以通过简单调整对各种食品(如冷冻甜甜圈、冷冻水饺、冷冻包子等产品的内包装生产线。)、药品、电子产品、日化品等众多物品进行分拣包装。

• 高效、灵活、精准的特性,能够显著提升生产线的自动化水平和生产效率,降低生产成本,提高产品质量和市场竞争力。
| 可以将3种或者3种以上的袋装来料,分拣按颜色分类整齐放入包装盒内。 | 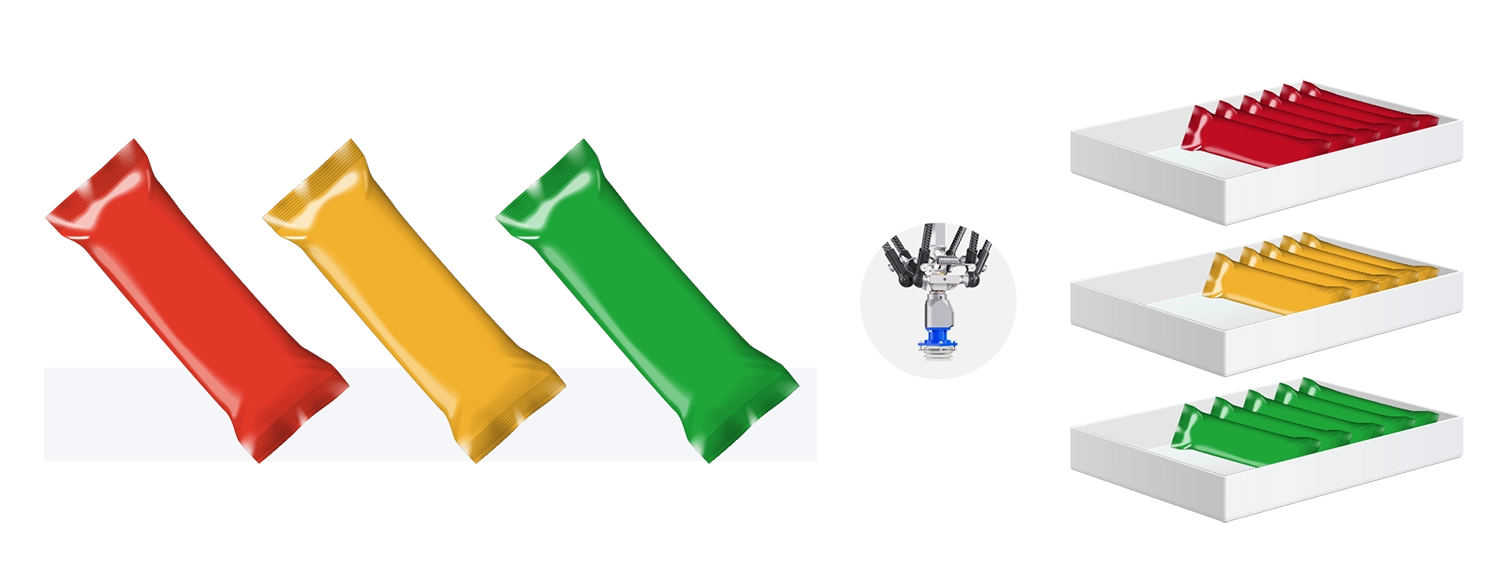 |
| 可以将不同形状的来料抓取后整齐的放入塑料托盘内,装满塑料托盘后输送到包装系统进行下一步的包装。 | 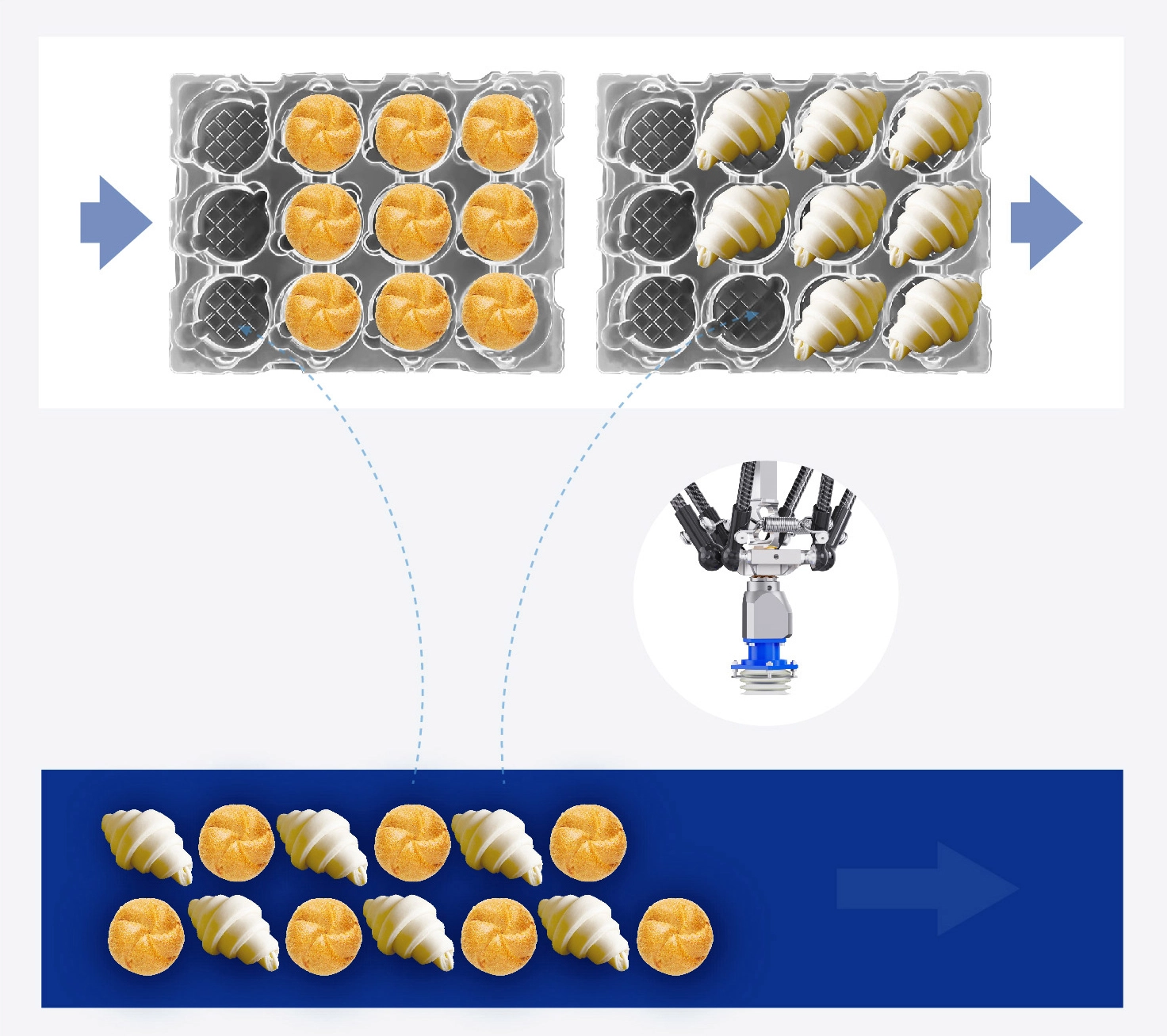 |
高效灵活精准
Delta机器人夹爪举例
针对来料不同,通过对抓手的设计更换,可以对市场多种物料的精细抓取、分拣、装箱。
为保证食品的造型完整和食品安全,夹爪采用食品级材料,根据食品的造型及特性不同,匹配合适的夹爪,将来料精准放入包装盒内或者其它形式的容器内,整齐摆放经传输带送入下一个环节。 |
 |


| 技术参数 |
产品型号: 额定工作范围: 有效负载: 防护等级: 噪音水平: 拾取速度: 重复定位精度: 重量: 安装方式: |
HJ-D11003-1 无旋转轴款 H(250-400)mm∅(580-1100)mm 6-20Kg IP65 <68dB(A) 40-100P/min ±0.2mm 65Kg 吊装 |
| 产品优势 |
高速节拍:机器人以每分钟55次的速度进行高速分拣,自动调整堆叠数量,确保包装的美观和稳定性。 运动惯性小:平行并联结构有效降低了运动过程中的惯性,使得机器人动作更加敏捷,响应速度快。 占地面积小:紧凑的设计使得机器人在有限的空间内能发挥最大效能,提高了生产线的空间利用率。 重量轻:轻量化设计不仅减轻了设备自身的负载,也减轻了运动时的能耗,提高了能源利用效率。 累计误差小:高精度的控制系统和机械结构相结合,确保了长期运行下的低累计误差,保证了产品质量的稳定性。 协同作业:多台Delta机器人并列分布,形成模块化协同作业系统,每台机器人独立工作又相互配合,共同完成来料抓取、 搬运和堆叠任务。 高精度控制:先进的控制算法和传感器技术,使机器人能够精确执行每一个动作指令,满足精细作业的需求。 |
|
| 使用环境 |
地面承重 震动 干扰 |
平均 ≧500kg/㎡ 不大于0.5G 无强无线电等干扰 |